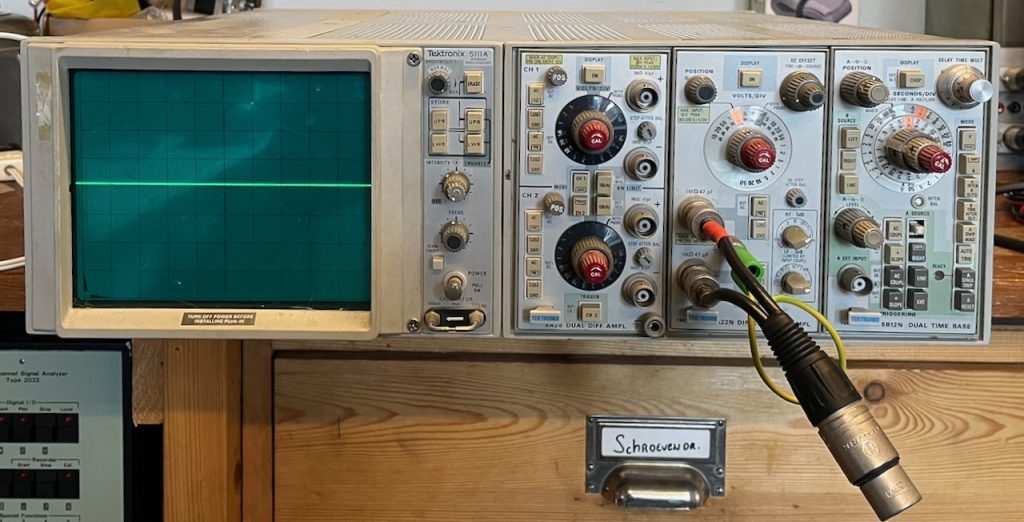
Naar aanleiding van een vraag op een elektronicaforum probeerde ik of het signaal uit een DCF77 ferriet antenne sterk genoeg is om direct op de scope te bekijken. De DCF77 tijdseinzender uit Mainflingen, Duitsland zend met ruw 35 kW uit op een lange golflengte van 77,5 kHz. Het signaal blijkt inderdaad direct meetbaar, hoewel ik een beetje vals speel met het type scope.
De gebruikte Tektronix 5A22N plug-in biedt misschien wel de gevoeligste scope ingang die er is: 10 µV/div. Om die gevoeligheid daadwerkelijk bruikbaar te maken kan om ruis te onderdrukken de bandbreedte verklein worden tot de noodzakelijke. De plug-in is samen met een 5B12N tijdbasis in een 5111A storage mainframe geplaatst.
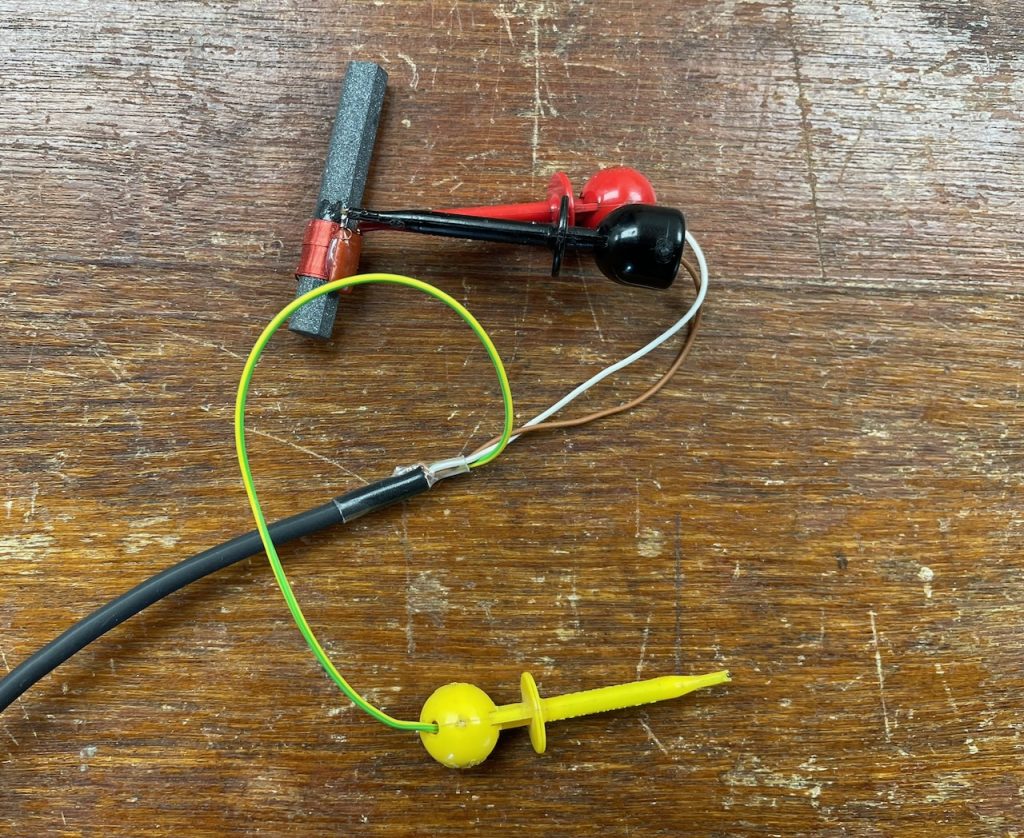
De antenne is een standaard ferriet antenne, met een condensator afgestemd op 77,5 kHz. Deze antenne hoorde bij een defect DCF ontvanger printje van het Klokkenproject.
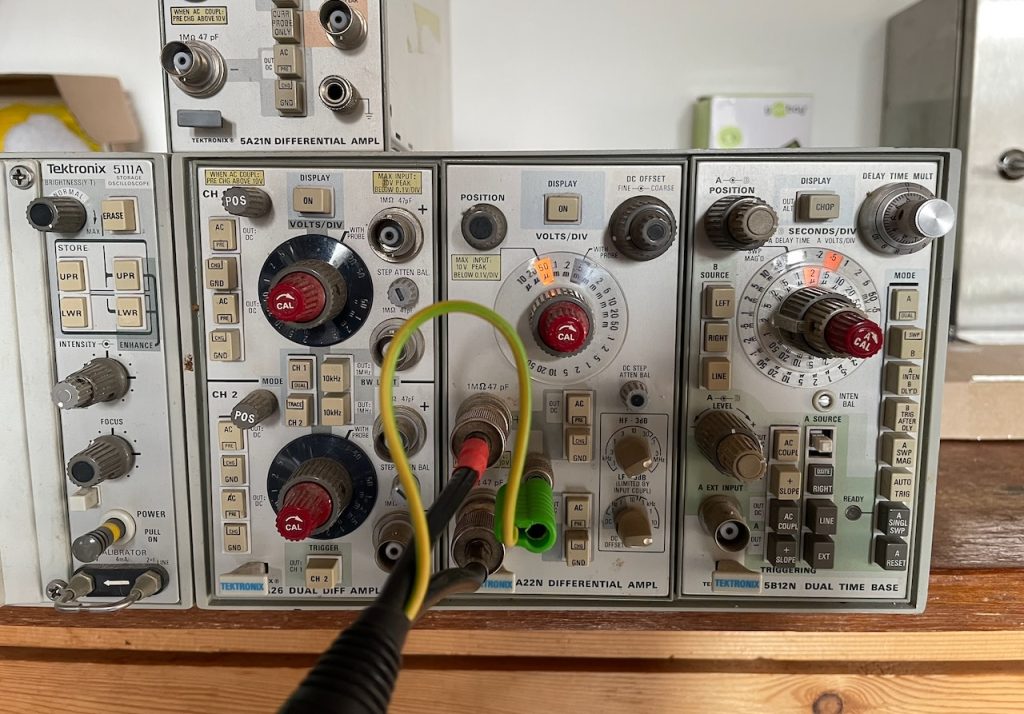
De ingang van de scope is differentieel. Dat wil zeggen dat de gevoelige ingang stroomkring elektronisch gescheiden is van aarde. De onderdrukking van common-mode signalen die gelijk zijn op beide ingangen is goed, ik mat 75 dB onderdrukking bij 77 kHz met de ingangen aan elkaar. De signaal stroomkring wordt op de scope aangesloten op twee aparte BNC connectoren voor “+” en “-“. In mijn lab heb ik echter gestandaardiseerd op xlr kabels uit de audiotechniek voor dit soort verbindingen, dus werden voor de proef een paar verlopen gebruikt. De afscherming van de kabel is met een aparte draad en 4mm stekker verbonden met het cassis van de scope, en nergens mee bij de antenne.
De differentiële ingang is belangrijk, met dezelfde antenne single-ended aangesloten is het DCF signaal soms nog net zichtbaar boven de ruis.
De gebruikte instellingen van de scope zijn:
Tektronix 5111A met 5A22N plug-in.
AC, differentieel.
50 µV / div.
10 kHz HP
0,1 MHz LP
0,5 s /div
Analoge storage
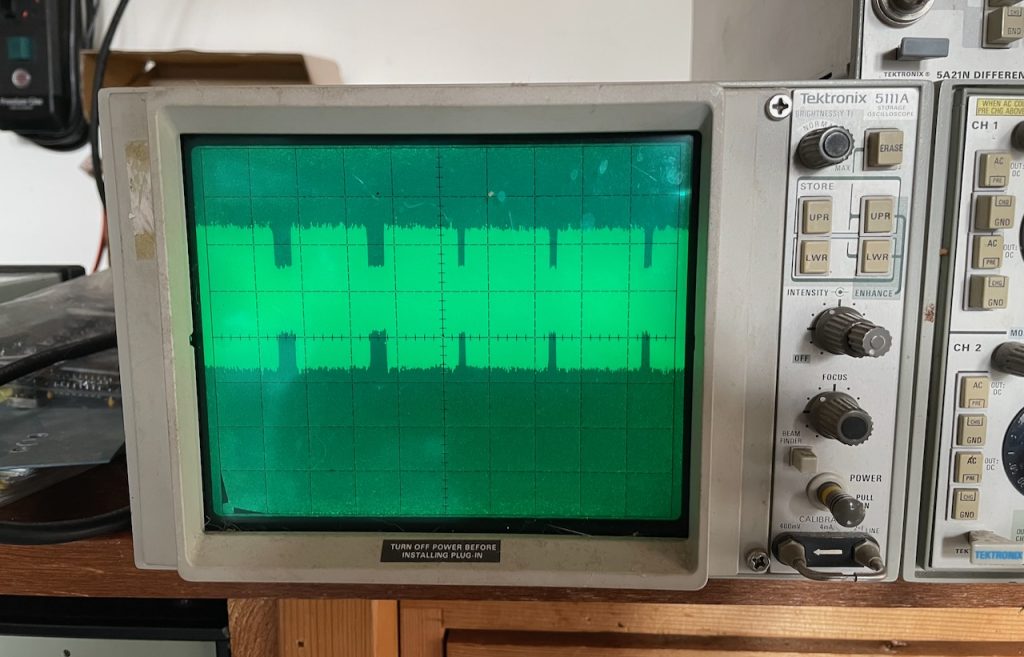
Met deze opstelling is het signaal uit de antenne goed zichtbaar te maken. Het is amplitude gemoduleerd met 1 bit informatie per seconde. Een korte afname van de amplitude is een 0, een lange een 1. De 59e seconde wordt geen puls verzonden om de volgende minuut aan te duiden. Zo wordt iedere minuut onder andere de datum en de tijd overgebracht.
De gemeten amplitude is ongeveer 150 µVpp in de ingang, die een impedantie van 2 MΩ // 23 pF heeft. Spelen met de oriëntatie van de antenne en de led-verlichting hier maakt de invloed van storing en het richten van de antenne direct inzichtelijk. Het DCF signaal is zwak en verstoring is een bekend probleem. Het signaal is maximaal met de antenne haaks op de lijn tussen hier en Mainflingen gericht.
De Tektronix 5100-series scopes werden gemaakt tussen 1971 en 1991. Ze zijn in tegenstelling tot de bekendere 7000-series niet erg gewild, vooral omdat het met 2 MHz bandbreedte vermoedelijk de traagste “gewone” scopes zijn. Als meer bandbreedte niet nodig is zit die echter alleen maar in de weg in de vorm van extra ruis. Dan is dit een goed en comfortabel instrument, met een groot storage scherm en zonder lawaaierige ventilator. De 5A22N plug-in was ook toen al bijzonder gevoelig. Moderne scopes zijn gewoonlijk niet gevoeliger dan 1 mV/div, voor dit soort metingen worden nu aparte Differential Preamplifiers toegepast.
De Astrograaf op de Oude Sterrewacht in Leiden is een lenzenkijker met een opening van 340 mm uit 1898. Hij is maakte foto’s van de sterrenhemel op 150×150 mm glazen negatieven. De Astrograaf is in 2013 voorzien van de zogeheten corrector, een speciaal ontwikkelde module die het mogelijk maakt deze van oorspong enkel fotografische kijker te gebruiken als een gewone telescoop, dat wil zeggen met een oculair of met moderne camera’s.
De corrector is door zijn maker voorzien van een gemotoriseerde focus. Dit is praktisch als een moderne camera toegepast wordt en het oculair van de ruim vijf meter lange kijker buiten handbereik is. Men kan dan comfortabel scherpstellen in de buurt van de computer, of dit zelfs automatiseren. Dit systeem is indertijd echter niet afgemaakt. Het was hoog tijd om de draad op te pakken. De wens was nu een bedrade afstandbediening te realiseren.
Voor de gemotoriseerde focus zijn in de corrector een stappenmotor en een Trinamic StepRocker TMCM 1110 controller ingebouwd. Deze controller kan geprogrammeerd worden in de Trinamic Motion Control Language oftewel TMCL. Het is als technicus een leuke uitdaging iets te schrijven in een programmeertaal die men nog niet kent.
De hardware bestaat uit een knoppenkastje dat met een lange kabel aangesloten wordt op de corrector. Ook de voeding uit een 12V netadapter loopt via deze kabel. Omdat de i/o pinnen van het StepRocker board zonder filtering met de microcontroller verbonden zijn is gekozen voor een robuuste, optisch gescheiden interface.
Het StepRocker board heeft geen aansluiting voor de referentiespanning van het i/o. Daarom zijn hiervoor output pinnen gebruikt die in de firmware permanent hoog gemaakt worden. De serieweerstanden zijn opgedeeld met de bedoeling extra common-mode demping te realiseren, vooral tegen het uitstralen van HF van de controller.
Voor het ontwikkelen van de firmware werd een testopstelling in het lab gebruikt, met een ander motortje en drukknoppen in plaats van de eindschakelaars.
TMCL programma
Een wens was dat de focus altijd met de hand versteld kan worden als er niet op een knop gedrukt wordt. Dit is bereikt door met de regel: “SAP 167, 0, 0” de schakelende eindtrap die de wikkelingen stuurt helemaal uit te schakelen. De motorstroom op “0” zetten werkt niet, er blijft dan een kleine stroom lopen die handbediening tegenwerkt en waardoor de motor kan gaan trillen.
Deze werking heeft tot gevolg dat dat microstap-positie van de motor tussen bewegingen verloren raakt. Dit is voor de toepassing acceptabel, het focus mechanisme heeft een grote mechanische overbrenging in de vorm van een spindel.
C
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
// Fotograaf StepRcoker focus controller TMCL programma v1.0
// WLS Aart 01-2026
vmax=100// quite slow
current=64// about 0,2 A @ 12 V from the power supply
// All SAP: Instruction nr, motor nr, value
SAP4,0,vmax// Maximum speed 0-2047
SAP5,0,20// Maximum acceleration 0-2047
SAP6,0,current// Maximum motor current 0-255 (0-max)
// SGP 77, 0, 1 , 0 // start TMCL applicatie after power up - set once
WAIT TICKS,0,100
// *** Main Loop *** //
loop:
GIO1,0// read pin 3
COMP0// compare accu with 0
JC EQ,turnRight// if equal jump to turn right
GIO2,0,// read pin 5
COMP0// compare with 0
JC EQ,turnLeft// if equal jump to turn left
MST0,// Stop motor
SAP167,0,0// chopper off time - 0 = off, freewheel motor
JA loop// jump to loop
turnRight:
SAP167,0,8// chopper off time - 8 = normal ?
ROR0,vmax// turn right at vmax
JA loop// jump to loop
turnLeft:
SAP167,0,8// chopper off time - 8 = normal ?
ROL0,vmax// turn left at vmax
JA loop// jump to loop
Zoals aan de code te zien is lijkt TMCL wat op een assembly taal. Het is een compleet uitgeruste programmeertaal, met voorwaardelijke sprongen, i/o, timers etc.
Het is vanuit de bijbehorende IDE zowel mogelijk in “direct mode” onmiddellijke TMCL opdrachten te geven aan de controller via USB, als een compleet programma te schijven en uploaden. Door het (eenmalig) instellen van “SGP 77” start het geladen programma automatisch op zodat de controller verder stand-alone kan werken. Deze mogelijkheid is hier gebruikt.
De corrector bij de laatste test voor het weer inbouwen.
Wat corrigeert de corrector?
Kort door de bocht corrigeert de corrector de kleurcorrectie van de Astrograaf. Zijn objectief is aangepast aan het gebruik van fotografische platen, die gevoelig zijn voor het blauwe deel van het spectrum. Deze eigenschap geeft een grote kleurfout, “blauwe ringen” om sterren, als met een oculair of moderne camera wordt waargenomen. De voor de Astrograaf op maat gemaakte corrector compenseert deze kleurfout.
Voor een uitgebreide geschiedenis en uitleg verwijs ik u naar dit artikel bij de Werkgroep Leidse Sterrewacht, waar ik deel van uit maak.
Op Hackaday zag ik vandaag in het kader van de “2025 component abuse challenge” een geweldige thermische flipflop.
De challenge deed mij denken aan een netspanning sensor die ik in 2017 maakte om de spanning op de motoren van een groot ventilatie systeem in te lezen in een microcontroller. Deze spanning werd ingesteld met een autotransformator en een schakelaar.
De “schakeling” bestaat uit twee weerstanden van 56 kΩ, waarvan er ´één gevoed wordt met de te meten spanning. De andere is de referentie en niet aangesloten. Beiden zijn met lijm thermisch gekoppeld met ds18B20 1-wire temperatuur sensoren. Als de spanning toeneemt, neemt ook het temperatuurverschil tussen de weerstanden toe. Dit is evenredig met het aan de weerstand toegevoerde vermogen, en daarmee met het kwadraat van de aangelegde spanning. Dit is een bekend principe dat ook toegepast wordt in RMS converters, HF-vermogens meters etc. Door beide sensoren van een weerstand te voorzien zijn de thermische tijdconstanten zo veel mogelijk gelijk.
Eigenschappen van dit knutsel zijn:
Robuust en traag. Ongevoelig voor interferentie op het net.
Direct een toegankelijke digitale OneWire interface.
Behoorlijke isolatie van het net. Of het aan formele eisen voldoet is wat anders..
True RMS, werkt ook goed met verminkte golfvormen.
Nauwkeurigheid na kalibratie een paar %, vanaf 50 V.
Opgenomen vermogen 1W bij 230V.
Merk op dat een goede thermische isolatie tussen de weerstanden voor de werking niet nodig is, zie ook de referentie temperatuur in de grafiek. De enige eis is een stabiele thermische weerstand tussen de beide weerstanden en naar de omgeving. Een dicht kastje is belangrijk.
Voor deze jaren ’90 multimeter was weinig belangstelling omdat hij in ruwe staat was: De accu was kapot, het display had lijnen, hij was smerig en enkel het AC bereik leek nog te werken. Ik kon het niet laten hem te adopteren, ook uit nieuwsgierigheid.
Zoals op de foto te zien is deze meter ENORM, zeker in vergelijking met mijn trouwe 110 uit dezelfde tijd, en ook groter dan dat noodzakelijk lijkt voor het scherm en de knoppen. Vermoedelijk is hij bedoeld voor service werkplaatsen, niet voor onderweg. Ook is in het royale batterijvak ruimte voor zes AA cellen naast een eveneens 6x AA NiCd accu pack, en zijn er reserve zekeringen.
Reparaties
De eerste prioriteit was de draaiknop te repareren, anders is hij onbruikbaar. In het commentaar onder een YouTube video stonden goede aanwijzingen: Het probleem zou niet het sleepcontact van de draaiknop zelf zijn, maar de verbinding tussen de koolstof vlakjes van de schakelaar en de printsporen. De schakeling is te vinden in de overigens uitstekende service manual:
Het is dus een eenvoudige DAC om de stand van de schakelaar in te kunnen lezen met een enkele ADC pin van de microcontroller. De met de weerstanden ingestelde verhoudingen tussen de spanning op TP22 en de VDD liggen bij na-rekenen op een rechte lijn.
Bij meten tussen de contactvlakjes en de weerstanden zijn daar echter inderdaad tot tientallen kΩ overgangsweerstand, die de werking van deze schakeling verstoren. Opvallend is dat vrijwel al deze verbindingen slecht zijn.
Ik besloot de overgangen van printspoor naar contactvlak voorzichtig te aaien met een glasvezel pen om loszittend koolstof weg te halen, maakte alles daarna goed schoon met IPA en stipte enkel de overgangen aan met geleidende verf, type “Bare Conductive, Electric Paint”. Na een dag drogen werd met een wattenstaafje nog een minimale hoeveelheid Kontakt 61 op het sleepcontact aangebracht. Deze reparatie loste het probleem op, alle standen van de schakelaar werkten weer goed. De overgangsweerstand daalde naar tientallen Ω. We zullen zien hoe lang het houdt.
Overigens is op dezelfde as aan de andere zijde van de print een echte wafer geplaatst om signalen om te schakelen. Hier was niets mee aan de hand dus ben ik er afgebleven.
Met het grootste probleem opgelost werd voor een paar tientjes een nieuw display in China en een nieuw (vervangend) BP7217 NiMh accu pakket in Nederland besteld. Het verbaasde dat die voor dit oude en relatief zeldzame instrument goed te krijgen zijn. Omdat de meter helemaal uit elkaar moest was dit een mooie gelegenheid voor een poets-sessie met gewoon afwasmiddel en een schuursponsje. Daar knapte hij zo van op dat de 110 ook een bad gekregen heeft.
Kalibratie en techniek
De kalibratie van alle bereiken lijkt in orde, de multimeters zijn het behoorlijk met elkaar en de lab referenties eens. Overigens is de spanningsreferentie in de meter een “gewone” zener diode, een 1N4578 van 6,4 V. De schakeling is klassiek: Een niet-inverterende 1,27x versterker en een weerstand van 845 Ω stellen de stroom door de diode in op de voor de diode gespecificeerde 2 mA.
De speciale Fluke BE 860 230 netadapter of “Battery eliminator” is een curiositeit. Omdat er in de meter geen galvanische scheiding is, is de adapter helemaal geïsoleerd tot de 1000 V die ten opzichten van aarde gemeten mag worden. Dit leidde tot een dik snoer en een extreem lange, dunne DC connector die in een klein gaatje gestoken moet worden.
Vermoedelijk geeft deze oplossing met een 50 Hz transformator de hoogst bereikbare common-mode impedantie, beter dan met een geïsoleerde smps in de meter te bereiken zou zijn. Dit is belangrijk voor een multimeter. Het instrument moet goed zweven om de metingen niet te verstoren. De totale parasitaire capaciteit van de netadapter is slechts 20 pF, het lek is bij een net van 230V/50Hz dan enkele µA.
De aftermarket smps adapters voor deze meter die op internet te vinden zijn zouden wat dit betreft minder kunnen presteren.
Eerste ervaringen
Wat is dit nu voor instrument?
De grote Fluke is lomp, traag in alles en werkt slechts 8 uur op een power pack.
Hij bevat twee instrumenten in een: een 4,5 digit multimeter en een 4,8 Megasample, 1 MHz bandbreedte scope kanaal dat de bemeten golfvorm kan tonen.
De continuïteit test is snel bij het detecteren van contact, maar niet bij onderbrekingen. De nederige Fluke 110 wint dit royaal.
Bij AC metingen heeft men de keuze uit gemiddelde- of RMS metingen, wat in de meter als twee aparte analoge kanalen is uitgevoerd.
Er zijn uitgebreide frequentie / PWM / periode functies voor zowel AC als DC.
Een interessante optie is de TrendGraph display mode, die bij bijna alle functies gekozen kan worden en de gemeten waarde tegen de tijd plot. Dit is een functie die ik soms mis op luxe moderne scopes. Helaas loopt de verticale schaal van de trend altijd van 0 tot de maximale waarde van het bereik, wat kleine variaties onzichtbaar maakt. Een gemiste kans, mogelijk was extra geheugen nog te duur.
De diode test werkt bipolair, wat zowel praktisch als enigszins verwarrend kan zijn.
De ingebouwde componenten tester of “tracker” is een fraaie extra. De frequentie is in decades te kiezen tussen de 2 Hz en 18,75 kHz en de uitgangsspanning is 3,2 Vpp bij een impedantie van 11,1 kΩ. Deze werkt uitstekend.
De grote Fluke heeft dus uitgebreide voorzieningen voor reparaties op component niveau, maar niets voor industriële toepassingen.
Vermoedelijk was dit model gericht op service werkplaatsen voor bijvoorbeeld kantoor machines zoals printers, plotters en kopieermachines, of professionele audio/visuele apparatuur zoals camera’s en videorecorders. Zoals die halverwege de jaren ’90 nog op grote schaal in gebruik waren. Hij lijkt erg geschikt voor het meten aan (PWM-) motor regelingen en dergelijke.
Voordat ik op de fiets stap, of als er bijzondere omstandigheden zijn zoals vandaag een warme dag, kijk ik graag even naar de actuele weer situatie in Nederland.
Het KNMI heeft onder andere een pagina met actuele waarnemingen. Deze laat echter maar 1 kaartje tegelijk zien, wat weinig overzicht geeft. Ook andere sites of apps vereisen naar mijn smaak vrij veel klik- en denkwerk om een compleet actueel overzicht te krijgen. De kaartjes van het KNMI hebben een statisch URL. Al weer jaren geleden schreef ik daarom, ouderwets met de hand, een HTML pagina die alle actuele kaartjes van de KNMI site op één pagina bij elkaar hotlinked.
Vintage HTML
De pagina zelf is ergens opgeslagen op mijn computers, de gelinkte plaatjes zijn uiteraard bij iedere verversing actueel.
Omdat de enige inhoud van het KNMI zelf komt lijkt het wat copyright betreft geen probleem de pagina toe te voegen aan dit blog.
Als u dit “dashboard” ook wilt gebruiken raad ik aan het lokaal op te slaan, dan bent u geheel onafhankelijk van dit blog.
Onlangs redde ik een half gesloopte Philips VLP-720 Laserdisc speler van de container. Over de geschiedenis van dit video systeem, dat maar een beperkt succes heeft gekend, is online veel te vinden. De grote hoeveelheid strikt analoge en op het oog eenvoudige elektronica maakte mij nieuwsgierig naar de werking. Een goede aanleiding om daar eens in te duiken.
Dit systeem is een directe voorloper van de digitale compact disc en latere systemen, die door sommigen nu weer vervangen worden door de LP die daaraan vooraf ging. Goed genoeg en (betrekkelijk) low tech techniek heeft zo zijn charmes. Maar dit terzijde.
Enige tekeningen in dit stukje zijn overgenomen uit de Duitstalige service manual.
Signaal
Laserdisc werkt geheel analoog. Het videokanaal en twee audio kanalen worden gemoduleerd met draaggolven van respectievelijk 7,33 MHz, 683 kHz en 1066 kHz.
De gemoduleerde signalen (a), video en (b) audio worden opgeteld tot (c) en geclipt om een analoog signaal (d) met twee niveau’s te verkrijgen.
Het zo verkregen signaal wordt als een lange spiraal van putjes (‘pits’) op de schijf geschreven. De schijf is bedekt met aluminum zodat hij het licht reflecteert. Omdat er slechts twee niveau’s zijn lijkt dit mogelijk digitaal, maar dat is slechts schijn, de tijd-as is hier geheel analoog oftewel continue.
Disc
De disc is 30 cm in doorsnede. De putjes liggen net zoals bij de latere CD 1,1 mm diep in het polycarbonaat van de schijf zodat zij goed beschermd zijn. Zij zijn 100 nm diep en 400 nm breed, bij een afstand van 1,6 tot 1,8 µm tussen de sporen. De discs zijn tweezijdig.
De uitlezing van de putjes gebeurd door interferentie. De gefocusseerde lichtbundel is breder als het spoor. Als er geen putje “in beeld” is wordt simpelweg al het licht weerkaatst. Als er wel een putje is vind destructieve interferentie plaats tussen het licht dat door de bodem van het putje weerkaatst wordt en het licht dat door het gebied er naast weerkaatst wordt. De fotodiode die het licht omzet in een elektrisch signaal wordt dan donker. Om dit te doen moet de weglengte in totaal 1/2 λ verschillen. Daarom zou men misschien verwachten dat de putjes 633 nm / 4, dus ruw 160 nm diep zijn. Dat de diepte van de putjes maar 100 nm moet zijn, is omdat rekening gehouden moet worden met de brekingsindex van het polycarbonaat van de disc. Deze is 1,6 in plaats van de 1 voor lucht.
Op basis van de numerieke apertuur van het objectief, 0,40 en de golflengte van de HeNe laser, 633 nm, zitten deze afmetingen op de grens van wat met deze optica waarneembaar is, en daarmee van van wat haalbaar was. Er past dus echt niet meer informatie op de schijf.
Optica
Het overzicht van het optische systeem ziet er op het eerste gezicht intimiderend complex uit. Dit is echter een combinatie van een viertal eenvoudigere systemen die elk een deelprobleem voor hun rekening nemen.
In het echt is het met de laser aan ook prachtig, maar men kan niet zien wat er gebeurd.
Polarisatie
Er wordt gebruik gemaakt van polarisatie om een optisch systeem met een hoog rendement te maken, en om te voorkomen dat licht terug gekaatst wordt de laser in. Hier kunnen (HeNe-) lasers namelijk niet tegen, ze worden onstabiel en gaan “pruttelen”.
De werking is als volgt: De laser is zelf gepolariseerd in verticale richting. De straal valt op de “polarizing cube beamsplitter”, welke zo geplaatst is dat licht met deze polarisatie richting over 90º wordt afgebogen. Hierna wordt de lineaire polarisatie door een 1/4 λ waveplate omgezet in een circulaire polarisatie rechtsom. De reflectie van het licht tegen de schijf maakt dat de circulaire polarisatierichting omkeert. Het terugkerende licht is dus linksom in plaats van rechtsom gepolariseerd. De bundel gaat opnieuw door de waveplate, die de circulaire polarisatie linksom omzet in een lineaire, maar nu verticale polarisatie. Dit licht gaat in de beamsplitter rechtdoor, en valt op de fotodiode. Zo wordt bereikt dat de fotodiode enkel het gereflecteerde licht ziet en dat zo veel mogelijk licht uit de laser op de fotodiode kan vallen.
Dit systeem werkt op basis van de polarisatie gevoeligheid van de beamsplitter en de werking van de 1/4 λ waveplate. Deze zijn gemaakt van materialen die voor de verschillende polarisatierichtingen een verschillende lichtsnelheid en dus brekingsindex kennen. Een voorbeeld hiervan is het mineraal Dubbelspaat, een vorm van calciet.
Optica leverancier Edmund Optics heeft een uitgebreidere uitleg over dit soort onderdelen.
Tracking
De tracking gebeurd door de laserstraal direct als hij uit de laser komt met een diffractie tralie op te splitsen in een hoofdstraal en stralen van een hogere orde, waarvan enkel de twee direct naast de hoofdstraal gebruikt worden. Deze doorlopen dezelfde optica als de hoofdstraal.
De hulpstralen vallen in de detector ieder op een aparte fotodiode, E en F genoemd. Het tracking regelsysteem zorgt er voor dat beide diodes even sterk belicht worden, en dus half op het spoor vallen.
Het bij-regelen van de tracking gebeurd op twee manieren: Traag door met een motor de wagen met daarop het objectief te verplaatsen, en snel door middel van een beweegbare spiegel.
Omdat het objectief op de wagen centimeters verplaatst wordt over de schijf terwijl de rest van de optica vast gemonteerd is, is de collimator lens noodzakelijk. Deze maakt dat de lichtstralen over deze variabele afstand evenwijdig lopen en dat de afstand niet uit maakt.
Focus
Het focusmechanisme meet het uit focus zijn door middel van een cilinder lens die voor de vier in een vierkant geplaatste fotodiodes geplaatst is.
Deze lens maakt dat het objectief in plaats van een enkel focuspunt twee focus lijnen onder een hoek van 90º op enige afstand van elkaar heeft. Midden tussen deze twee lijnen is het gezochte focuspunt, hier worden de vier fotodiodes gelijk belicht. Met een verschilversterker worden de signalen uit de diodes kruiselings vergeleken en op basis van dit signaal de hoogte van het objectief bij geregeld.
Met condensatoren wordt tegelijk het HF signaal met daarin de video en audio informatie van alle vier de diodes tegelijk afgenomen. De diodes E en F in deze tekening zijn die voor de tracking.
Het objectief wordt bewogen door een voice coil, een spoel die zoals in een luidspreker beweegt in een magneetveld.
Snelheid
Het is belangrijk te realiseren dat het signaal direct van de schijf naar een kleurentelevisie gaat, zonder enige vorm van buffering. Het was in de jaren ’70 ondenkbaar om in de speler ook maar een enkel video frame elektronisch op te slaan. Kleine fouten in de draaisnelheid of een iets excentrische schijf zouden daarom direct leiden tot grote beeldfouten. Om de speler probleemloos op iedere televisie te laten werken moet de tijd binnen 10 ns juist lopen.
Deze hoge nauwkeurigheid wordt in twee stappen bereikt:
De motor van de schijf wordt aangestuurd op basis van de beeldfrequentie, die 25 Hz moet zijn. Deze motor is voorzien van een tacho regeling.
Net zoals bij de tracking is er een bewegende spiegel om hoogfrequente fouten in de snelheid op te kunnen vangen. Deze wordt gericht op basis van een 3,75 MHz signaal dat mee opgenomen is op de schijf.
De beide genoemde spiegels zijn als aparte modules onder het objectief gemonteerd. De vanaf deze zijde gezien eerste is voor de tracking, de tweede voor de snelheid.
De bewegende spiegels oftewel spiegelgalvanometers zijn eenvoudig opgebouwd uit een spiegel op een levend scharnier met twee magneetjes er onder gelijmd, met daaromheen een spoel.
Tot besluit
Bovenop de beschreven basis bevat de elektronica van de speler de nodige complicaties om snel op te kunnen starten, te zoeken en om voor die tijd nieuwe functies zoals stilstaand beeld vanaf daartoe geschikte discs met een “CAV” indeling te realiseren. CAV, Constant Angular Velocity, wil zeggen dat er precies 1 beeld op 1 omwenteling van de schijf is opgenomen.
Mijn belangstelling gaat echter vooral uit naar de optica en de regeltechniek. De mechanische toleranties van disc en loopwerk zijn 0,1 mm, terwijl voor een goede werking van het aftasten een nauwkeurigheid beter dan 0,1 µm noodzakelijk is. Deze factor 1000 verbetering wordt gerealiseerd met de combinatie van de optica en typische “moderne” jaren ’70 elektronica, gebaseerd op discrete transistoren en opamps in de µA741 categorie. Beslist goed doordacht ontworpen, maar ook toen niet high end. Dat is dus niet nodig, de natuurkunde en niet de elektronica zet hier de grens aan wat mogelijk is.
Het is het vermelden waard dat Elektuur in 1990 een “laser unit” beschreef, op basis van de dump HeNe laser en spiegelgalvanometers bedoeld voor dit Laserdisc loopwerk. Overigens zonder het systeem te benoemen. De maanden er na volgt nog een fraaie Lissajous aansturing voor de galvanometers.
In mijn collectie heb ik een HeNe laser, afkomstig uit de personeelswinkel van Philips. Het schijnt dat deze gerelateerd is aan deze ontwikkeling. De kathode is bij deze laser naast de resonator geplaatst in plaats van eromheen. Toen ik een klein Aartje was heb ik deze zien werken, helaas is hij lek en wil inmiddels niet meer laseren.
Enige tijd geleden kreeg ik de vraag om een lichtdimmer te maken die vanaf helemaal “uit” of 0 kan regelen. Deze zal ingezet worden bij een demonstratieproef over sterrenkunde, waarbij men zelf kan ervaren dat witte sterren heter zijn dan rode.
Eenvoudige dimmer-schakelingen regelen niet vanaf nul, er is een kleine sprong omdat de gewoonlijk voor het triggeren toegepaste diac 30 V nodig heeft voor hij in geleiding gaat. Deze sprong is voor deze proef ongewenst.
Een technisch juiste oplossing hiervoor, die ik zelf ook gebruik voor de kerstboom-gloeilampjes, is een variac of regeltrafo. Deze regelt prachtig vanaf helemaal donker. Ook een kleine 1A variac bleek in dit geval echter te onhandig en zwaar omdat de proef samen met andere proefjes per rugzak en trein vervoerd moet worden.
Nu is een betere fase-aansnijding een huis-tuin en keuken timing-trucje waar een 555 geknipt voor zou zijn. Zelf een nieuwe schakeling ontwikkelen bleek echter niet nodig: Zoeken op “555 triac dimmer” leidde naar een ontwerp bedoeld voor het dimmen van led lampen op de mij verder onbekende website ElecCircuit.
Het is een wat wonderlijke site en een schema vol blije kleurtjes, maar de schakeling met enkel standaard componenten die ik in huis had sprak mij direct aan. Precies wat nodig is en verder niets. Voor een schema in de volle resolutie en een uitleg zie op die site. Met de instelpotmeter van 500 kΩ kan het nulpunt van de regelpotmeter precies voor het begin van de volgende periode van de netspanning ingesteld worden.
Ik bouwde de schakeling op een stukje gaatjesprint zonder eilanden. Alles is direct verbonden met het net, er is niets aanraak-veilig. Vandaar ook de keuze voor een potmeter met een kunststof as.
De schakeling werkte direct. Enkel timing condensator C3 van 10 nF moest voor een goed regelbereik verkleind worden tot 6,8 nF. Waarom dit zo was is niet verder onderzocht.
Onderkant van het printje.
De dimmer als dubbel geïsoleerd apparaat met een fitting ingebouwd in een kastje. Er wordt getest met een energiemeter. Op de foto neemt een standaard 150 W gloeilamp 9 W op, dan begint hij juist zichtbaar te gloeien. De schakeling regelt overigens niet helemaal vanaf “0,0”, omdat de instelling van het nulpunt dan te kritisch wordt. Dat is echter ook niet nodig, het werkt goed genoeg. De proef wordt uitgevoerd met een speciale, grote gloei lamp en in het donker.
Al met al een prettig dagje knutselen voor het goede doel.
Bij mechanica voor optica is het vaak belangrijk dat er een gat midden in het onderdeel zit om het licht door te laten. Deze gaten worden op de draaibank met een binnenboorbeitel op maat gedraaid.
Een zelfgemaakte adapter om andere optomechanica in plaats van een 2″ oculair op een telescoop te kunnen plaatsen.
Zo een binnenboorbeitel had ik al wel, maar een kleine korte die niet geschikt is voor de grotere gaten die ik nodig had. Geïnspireerd door te veel Youtube besloot ik te proberen zelf een grotere te maken uit een oud stuk stalen staf, met als voornaamste gereedschap de slijptol.
De eerste poging, de bovenste op de foto, mislukte. Het slijpwerk uit de hand was te scheef om met een vijl bij te werken. Maar ook de geometrie was fout: Het snijvlak van de beitel moet in mijn draaibank ruw 10 mm boven het vlak waarop hij geklemd wordt zitten. Als het 6 mm ronde HSS beiteltje snijdt in het midden van zijn gat dat ook weer in het midden van de beitel zit, zit, moet het 10 mm dikke deel waarop geklemd wordt onder het midden zitten. Een risico van beginnen zonder echte tekening te maken..
Links de achterkant van de beter geslaagde tweede poging. Het blauwe deel is niet verwijderd, de beitel kan toch maar op één manier gebruikt worden. De kop rechts was bij eerste- en tweede poging gelijk. Het gat voor de beitel is onder een hoek van ruw 30º ten opzichten van haaks geplaatst. De stelschroef om de beitel vast te zetten is M6.
Voor de tweede poging gebruikte ik een hulpmiddel: een stukje hoek-aluminium onder de slijptol gemonteerd zodat deze haaks, rechtop over tafel kan glijden. Dit maakt het eenvoudiger rechte sleuven te slijpen.
Ook aan het inklemmen van de staf en het opvangen van de vonken werd extra aandacht gegeven.
Het resultaat werkt beter dan verwacht. Het is mij al vaker gebleken dat het slijpen van HSS draaibeitels voor het aluminium en messing dat ik gewoonlijk bewerk niet erg kritisch is. Als het maar genoeg lijkt op een beitel, werkt het.
Overigens boor ik het ruwe gat met een gatzaag. Dat gaat vlot op mijn kleine draaibankje omdat er zo relatief weinig materiaal verspaand hoeft te worden. Van de kern kan zelfs nog iets anders gemaakt worden.
Deze keer geen elektronen maar watermoleculen. Het was hoog tijd voor een nieuwe stortbak. Omdat ik duurzaamheid interessant vind sloot ik de nieuwe bak aan op de regenton.
De nieuwe stortbak is voorzien van een tweede vlotterkraan, op de foto aan de linkerkant.
Het systeem werkt passief, op het hoogteverschil, wat maakt dat enkel ruw het bovenste 1/3 deel van de regenton bruikbaar is. Een pomp, met een bijkomend filter en regeling, is niet aantrekkelijk gezien de kosten en complexiteit.
Voor de leiding tussen de ton en de bak gebruikte ik een zwarte Tyleen slang van de Gamma. Dit het goedkoop, gepast materiaal en er is geen speciaal gereedschap nodig om het aan te sluiten. Het bleek mogelijk de slang in één keer met ruime bochten achter het keukenblok langs en onder het terras door te leiden. Zo is er het minste risico op lekkage. De leiding blijft overal laag, opdat er geen luchtbellen kunnen ontstaan.
Als er niet genoeg regenwater is wordt de stortbak gevuld met leidingwater. Het is hierbij belangrijk dat er nooit regenwater in het leidingnet kan komen, ook niet als de druk op de leiding wegvalt. Dat gebeurd niet vaak, maar als je er een dagje mee aan het knutselen bent bijvoorbeeld wel… Hiertoe installeerde ik tussen leiding en bak een wasmachinekraan. Deze speciale kranen zijn voorzien van een beluchter opdat er nooit water aangezogen kan worden uit de wasmachine, of in dit geval uit de stortbak. Ook is een wasmachinekraan veel prettiger in het gebruik als een klein stopkraantje als hij open of dicht moet om te kiezen tussen regen- of leidingwater. Voor een goede werking moet de wasmachinekraan op enige hoogte boven het waterniveau geplaatst worden.
De regenton is voorzien van een tweede kraan, een paar nep-Gardena koppelingen en een stukje tuinslang maken de installatie af.
Dit systeem werkt dit regenachtige voorjaar goed. De wat de hoogte betreft bruikbare voorraad regenwater is echter maar klein, ruw 50 liter. Dat maakt dat dit systeem water bespaart op het moment dat er geen gebrek aan water is, ruw analoog aan het feit dat zonnepanelen elektriciteit maken op de momenten dat daar inmiddels een overschot van is. Het voelt echter goed niet nodeloos leidingwater te verspillen, en natuurlijk zijn er al fantasieën over een veel grotere, hoger geplaatste regenwater tank.
Het kleine beetje vuil in het regenwater bleek de afgelopen maanden geen probleem voor de vlotterkraan. Een extra voordeel is dat het regenwater systeem door de lage druk doodstil is.
Update 02-2025: Het afgelopen najaar bereidde ik uit met een regenwaterkraan in de bijkeuken. Fijn voor de kamerplantjes die nu een dompelbad krijgen als het regent, en het moppen van de vloer. Ook is de regenton hoger geplaatst zodat een groter deel bruikbaar is voor de stortbak. Met als voornaamste parameters 50 m2 dak, 1 Aart en 165 liter ton waren er slechts enkele dagen waarop met leidingwater gespoeld moest worden, een groter vat was dit natte jaar niet zinvol.
De waterrekening over het afgelopen jaar is opgemaakt. Het systeem blijkt ruim 1/3 van mijn drinkwaterverbruik te besparen. Hoewel men er niet rijk van zal worden is de terugverdientijd niet onrealistisch lang.
Vervuiling met zand e.d. was dit eerste jaar geen probleem, er verzamelde zich wat modder onderin de ton.
Op een radiobeurs werden doosjes vol knipperlampjes weggegeven. Leuk, natuurlijk, maar er moet wel weer iets van gemaakt worden. Ik besloot tot een kunstwerk van knipperende lampjes. Inspiratie waren de “Blinkenlights” projecten zoals men die wel op Youtube en soortgelijks ziet. Voor een filmpje zie aldaar!
Knipper lampjes, 6,5 V 3 W.
De lampjes bevatten een bimetaal en knipperen vanzelf. Hierbij maken ze zelfs een klein beetje geluid, een zachte “ping”.
De voeding is een 1A variac gevolgd door een stevige 12 V transformator. De constructie is zo eenvoudig mogelijk: Hout, gestript VD draad en boekbinderslinnen voor de afwerking.
Ik bouwde dit een jaar geleden. De lampjes blijken niet erg betrouwbaar, ´één is definitief gedoofd en een paar anderen willen pas na een harde tik. Mogelijk zijn het afgekeurde lampjes?. Deze zijn niet meer te koop. Dit kunstwerk zal daarom hoe dan ook een eindige levensduur hebben, en hoe verder men de spanning opdraait hoe korter er genoten kan worden. De voeding gaat tot 12 V..
De eindigheid geeft het voor mij echter iets extra’s: Carpe diem.